CDHS - Command Data Handling System
Objetivo#
A função desta placa é (1) realizar toda a aquisição e processamento de dados, (2) salvá-los em um cartão microSD e (3) enviá-los para nossa estação em terra. A primeira atividade é fundamental porque são os dados adquiridos pelos sensores que permitem à aviônica reconhecer sua posição no espaço, detectar o momento de apogeu e ativar o sistema de recuperação do foguete. Já no solo, são os dados fornecidos pelo GPS e enviados para a equipe de operações que possibilita que o foguete seja encontrado.
É utilizado um Inertial Measurement Unit (IMU), modelo GY-91, para a obtenção de uma grande gama de dados. O GY-91 contém dois sensores: o BMP280, que atua como barômetro; e o MPU-9250, um sensor que é simultaneamente um acelerômetro, giroscópio e magnetômetro - todos em 3 dimensões. Portanto, o GY-91 é um dispositivo que possui 10DOF (degrees of freedom). Adquirem-se também dados de pressão com outro sensor, o BMP388. Sua função no circuito é puramente experimental - seus dados serão comparados posteriormente aos obtidos pelo BMP280.
Para que os dados sejam armazenados em tempo real durante o vôo é utilizado um breakout de microSD da SparkFun.
A transmissão dos dados obtidos em (a) é feito pelo módulo LoRa RFM95W associado a uma antena omnidirecional. Em terra, nossa antena direcional estará recebendo continuamente esses dados. Outro dispositivo cujo propósito é o envio de informações é o MTK3339 GPS Module, o GPS (Global Position System) utilizado para fornecer a posição do foguete e assim permitir que o time de operações o encontre depois que ele tenha pousado.
Todo o processamento dos dados obtidos e a tomada de decisões é feita pelo microcontrolador Teensy 3.5. Este microcontrolador foi escolhido por conta de seu grande poder de processamento. A placa conta também com LEDs de debugging e um buzzer, responsável pelo feedback auditivo necessário no momento da recuperação do foguete em solo.
Componentes#
Os componentes da placa são:
| Componente | Qtd | Obs |
|---|---|---|
| 40 pins flat connector | 1 | Barramento principal |
| Teensy 3.5 | 1 | - |
| GY-91 | 1 | - |
| BMP388 | 1 | - |
| GPS MTK3339 | 1 | - |
| LoRa RFM95W | 1 | - |
| MicroSD Adapter | 1 | - |
| LED | 4 | 3x Debugging, 1x GPS |
| Buzzer | 1 | Debugging |
| Resistor | 7 | 2x 4.7kΩ, 1x 72Ω, 3x 220Ω, 1x47Ω |
| Capacitor | 3 | 1x 47uF, 1x 10nF, 1x 0.1uF |
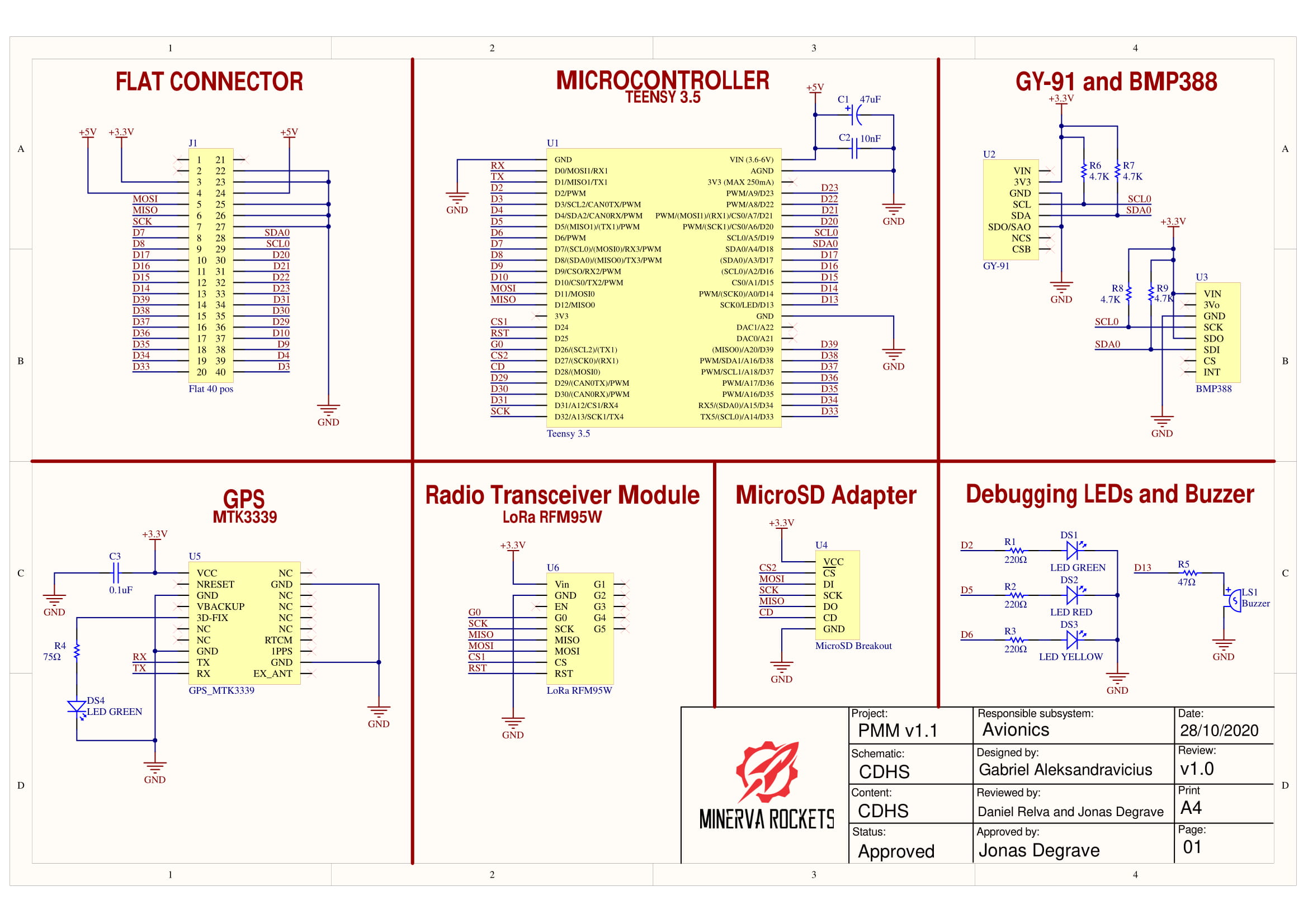
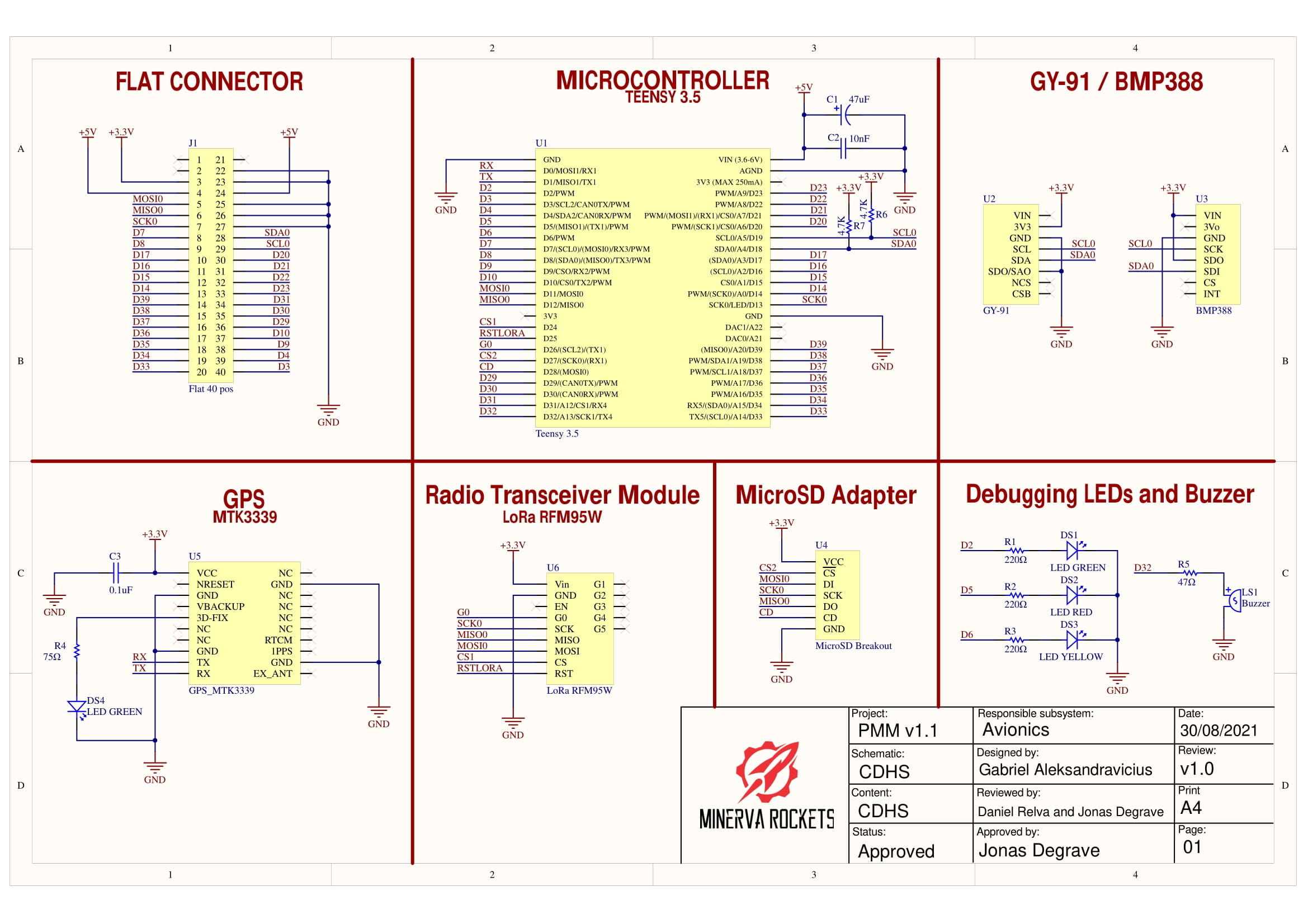
Esquemático e PCB#
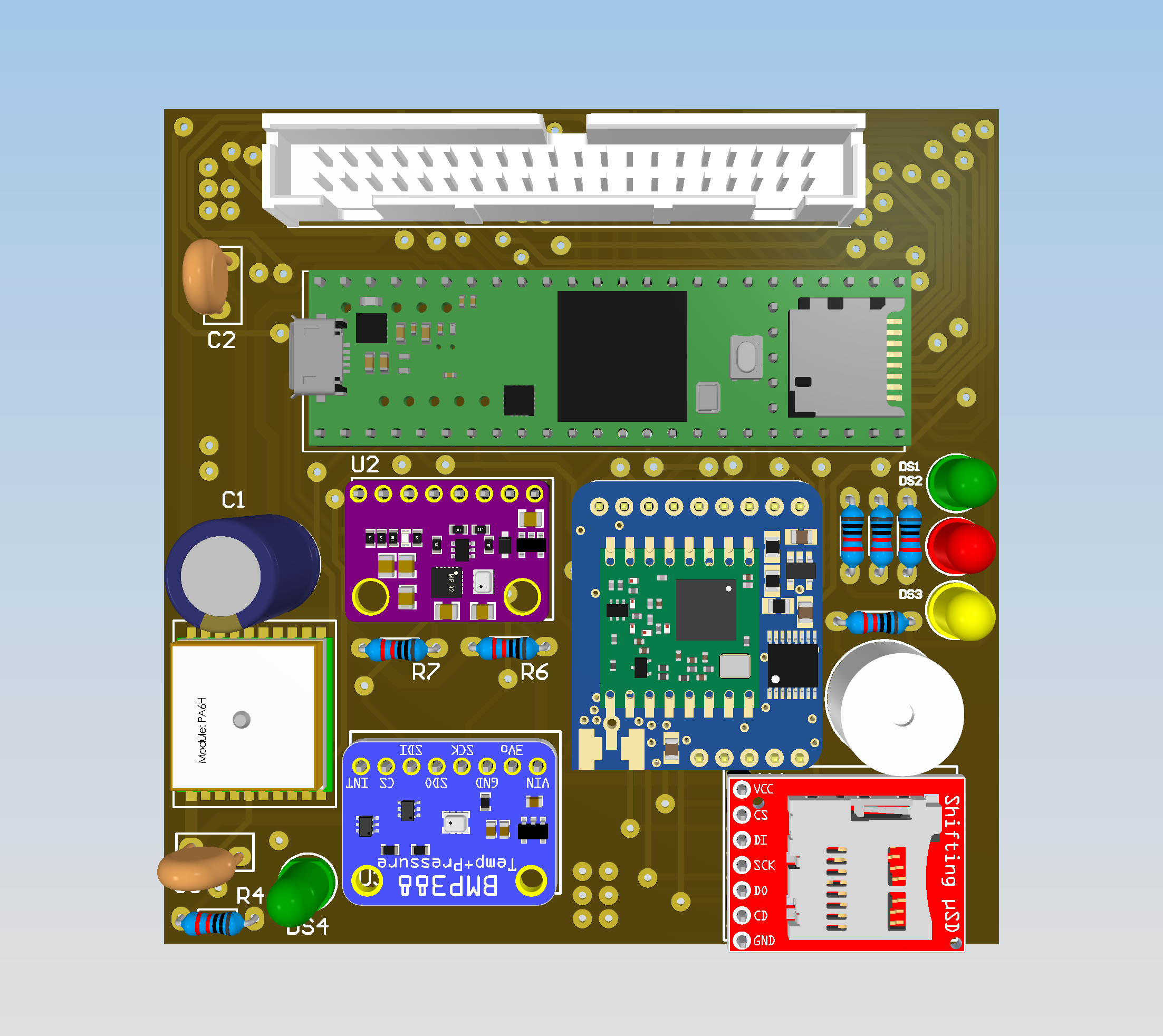
Versão do Protótipo#
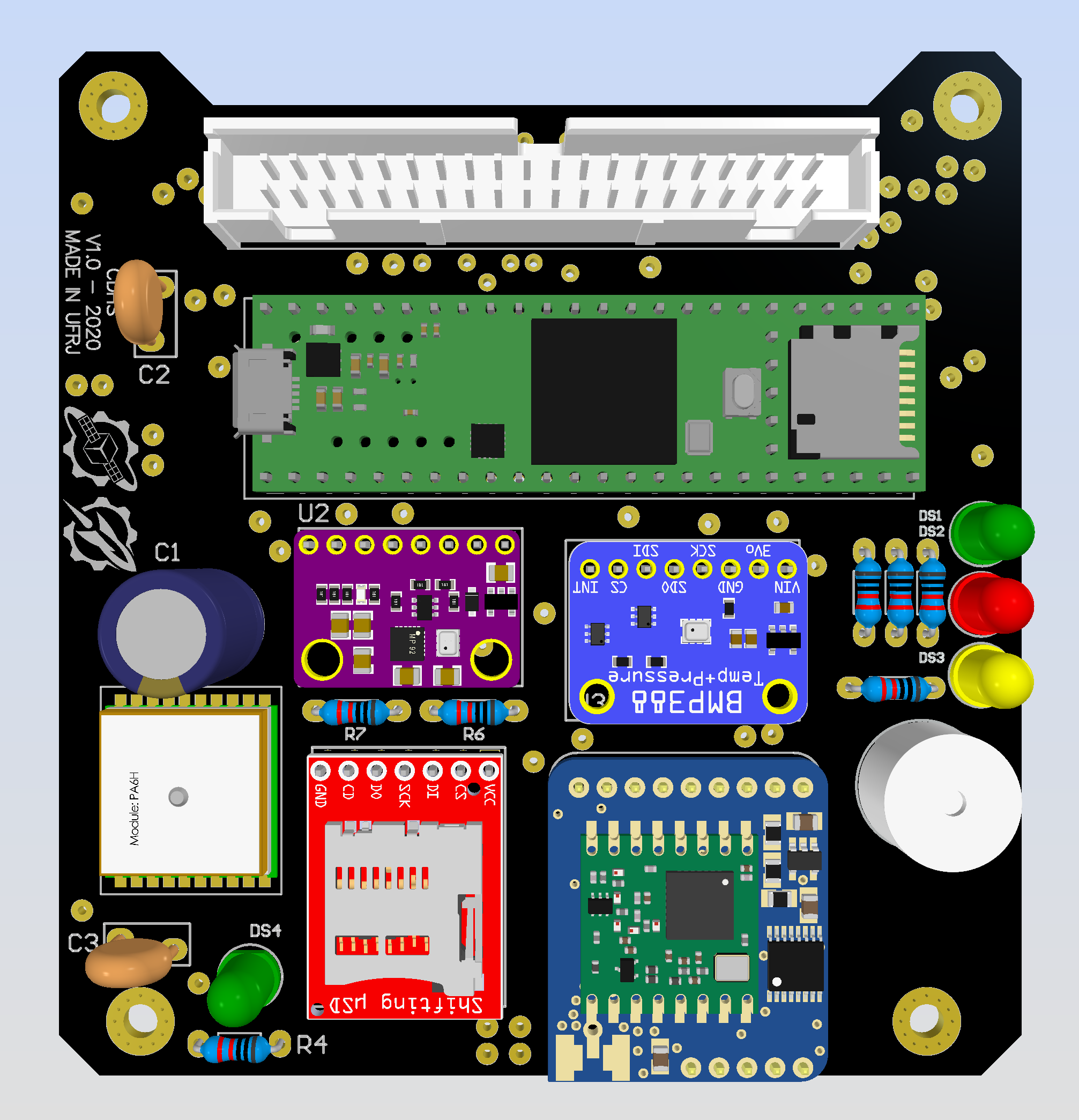
Versão atual#
Testes no protótipo#
Componentes soldados#
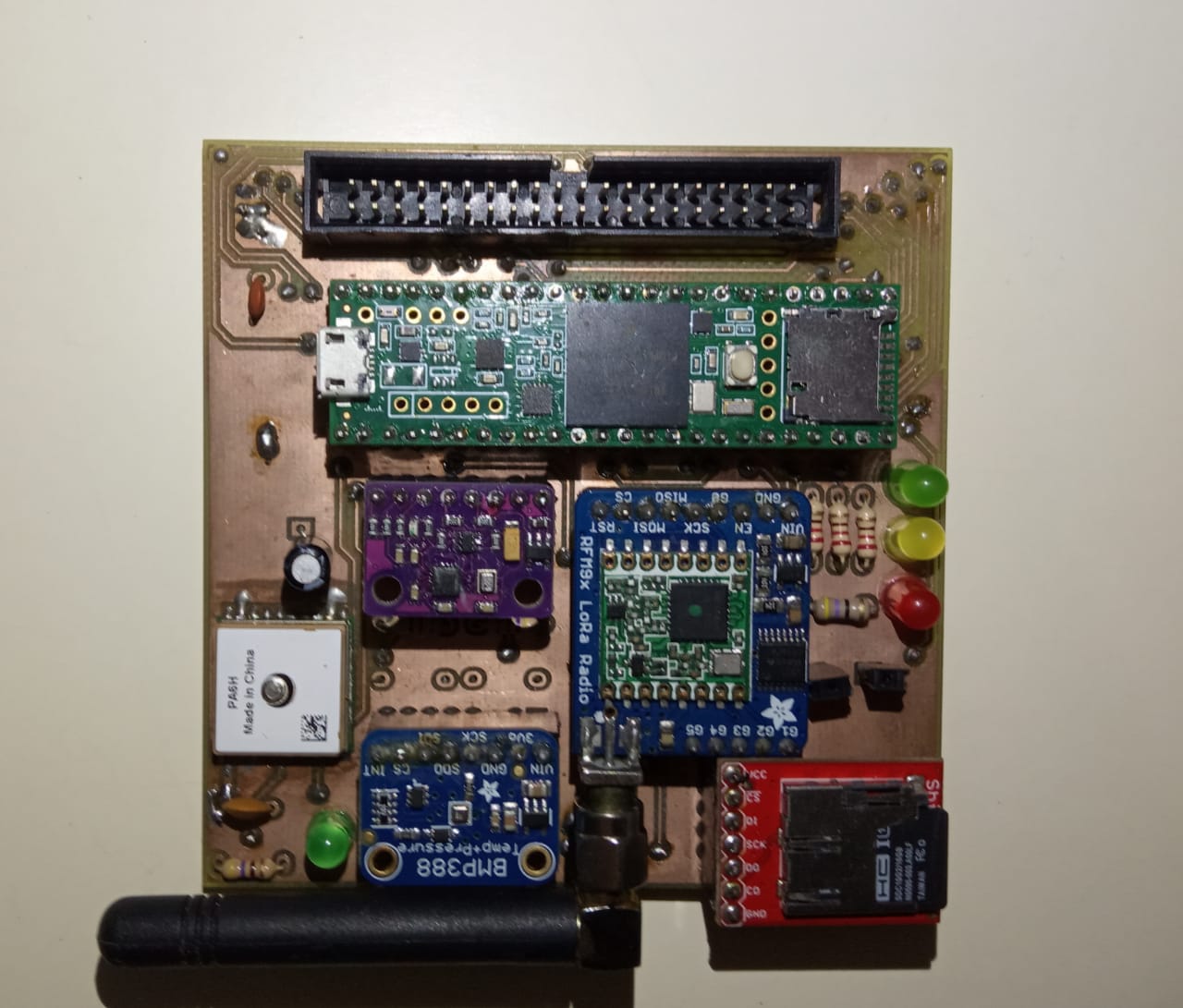
Para validar o CDHS antes de mandar fabricar, nós utilizamos a fresa do laboratório para fabricar um protótipo. Por limitações dos tamanhos de placas que tínhamos e da fresadora, esse protótipo tem dimensões 87x87. Abaixo estão imagens da placa após todos os componentes terem sido soldados.
Frente#
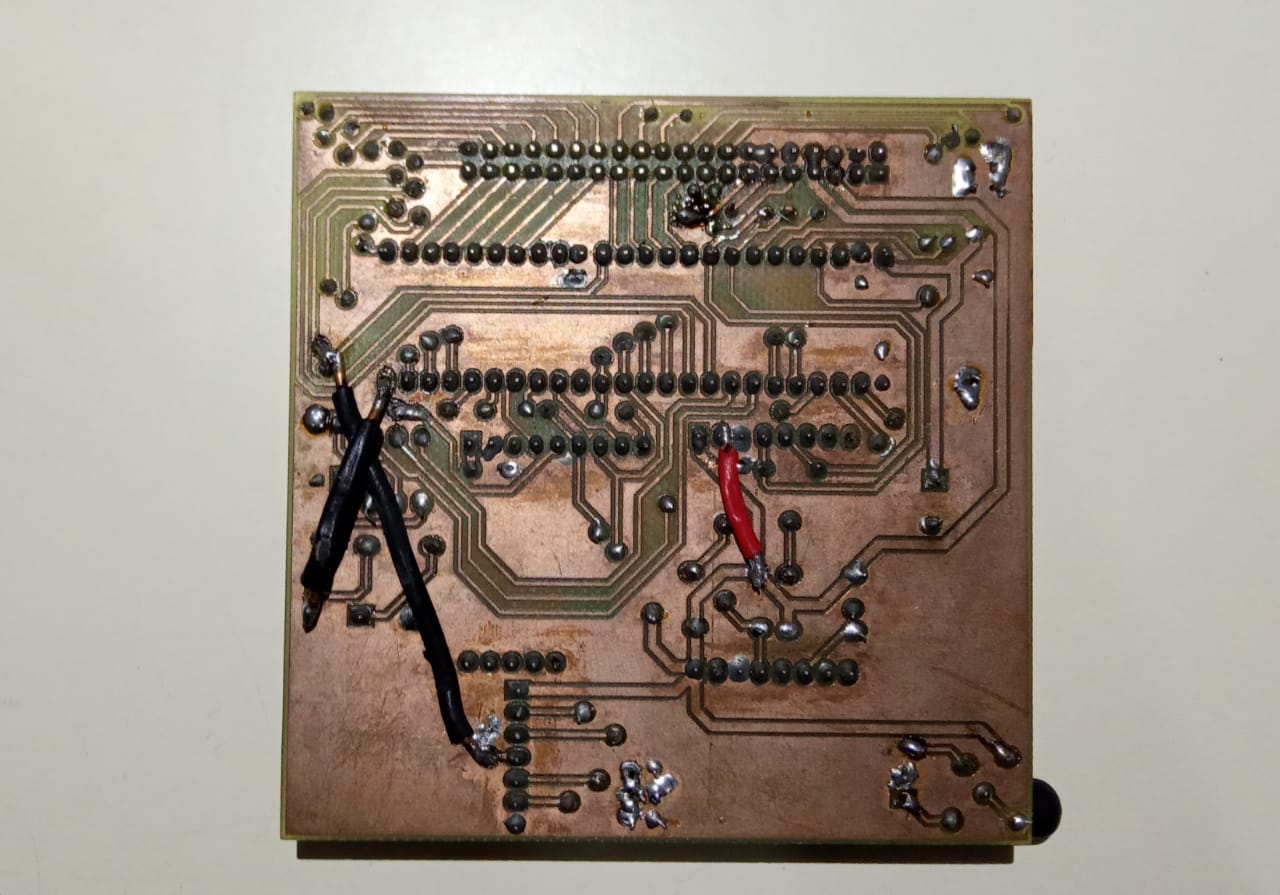
Trás#
Continuidade#
Testamos a continuidade das linhas de potência que alimentam o teensy e os sensores. Todas elas chegam corretamente Também testamos a comunicação dos planos de ground. Como são muitos grounds diferentes e corremos o risco de esquecer algum nesse teste, uma boa estratégia é apertar ctrl+shift e selecionar algum pino de ground na Board no Altium. Dessa maneira, todos os grounds ficarão destacados e podemos checá-los um a um. Nenhum problema foi encontrado nos planos de ground. Além disso, foi testada a continuidade para os pinos de sinal. Todos eles estão corretos.
Jumpers
Percebemos que a trilha do pino D32 estava chegando no teensy pela layer de cima, enquanto que a solda foi feita na layer de baixo. Um jumper foi soldado na placa de forma a corrigir esse erro e uma via foi colocada no Altium. Além disso, quando fizemos o teste de integração percebemos que o pino D32 não era apropriado para o clock - deveria ter sido escolhido o D13 no lugar. Dois jumpers foram colocados na placa, trocando o D32 com o D13. Por fim, foi retirado da placa um par de resistores na linha I2C, pois apenas um era necessário. Outro jumper foi colocado para corrigir a alimentação do GY-91, que havia sido feita no pino "Vin" mas devia ter sido feita no pino "3v3". Todas essas modificações também já foram feitas no Altium da placa.